Личные инструменты
Kapur, K.C., and Lamberson, L.R., (1977), Reliability in Engineering Design, pp 8-30, John Wiley & Sons, New York.
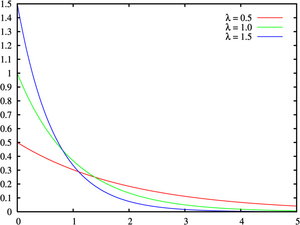
Как мы видим, при экспоненциальной функции распределения рисков функция плотности рисков оказывается константой (в таком случае говорят, что распределение не имеет 'памяти').
В качестве модели функции распределения рисков можно использовать различные известные функции распределения. Обычная модель - это экспоненциальное распределение рисков,
Теперь функцию интенсивности рисков можно определить следующим образом:
Функции распределения рисков соответствует некоторая функция плотности вероятности
где - время отказа.
Непрерывная Функция интенсивности рисков зависит от Функции распределения рисков , которая описывает вероятность отказа к моменту времени t:
Вычисляя дискретную функцию интенсивности рисков для всё меньших интервалов времени , мы получим ее непрерывный аналог:
Экспоненциальные функции плотности рисков
Функция интенсивности рисков в непрерывном случае
Появление в знаменателе объясняется тем, что фактически рассматривается условная вероятность.
В дискретном случае функция интенсивности рисков понимается как того, что поломка или смерть произошла в интервале времени . Функцию плотности рисков можно определить с помощью , которая показывает вероятность отсутствия отказов до момента времени :
Функция интенсивности в дискретном случае
Функция интенсивности рисков (этот термин был впервые использован в работе Barlow, 1963) определяется как вероятность того, что объект, выживший к началу соответствующего интервала, откажет или умрет в течение этого интервала.
Материал из MachineLearning.
Функция интенсивности рисков
Функция интенсивности рисков
Комментариев нет:
Отправить комментарий